Difference between revisions of "API2"
From RobotinoWiki
(→Robotino API2 Overview) |
(→Package links) |
||
| Line 6: | Line 6: | ||
! style="text-align:left; width:20em; background-color:#dddddd"| | ! style="text-align:left; width:20em; background-color:#dddddd"| | ||
=== Package links === | === Package links === | ||
| − | [[downloads# | + | [[downloads#API2|API2 binary packages]] |
[[downloads#CF_card_images|API2 ready to use CF card image]] | [[downloads#CF_card_images|API2 ready to use CF card image]] | ||
Revision as of 15:38, 17 June 2014
Contents
Introduction
| The new API2 for Robotino is currently in its final stages of development and it is supposed to replace the current OpenRobotinoAPI on Robotino. |
Package links |
|---|
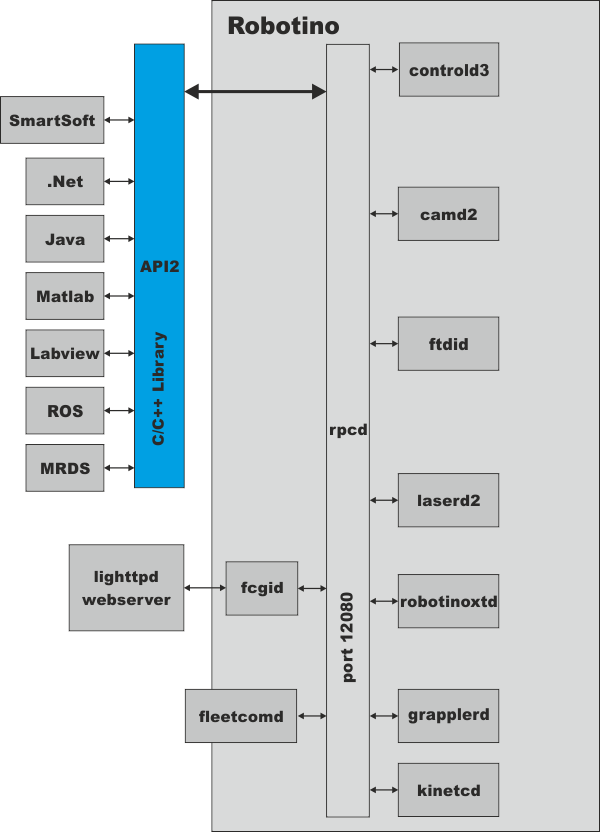
The new API2 is based on a RPC like infrastructure. The REC-RPC library is a interprocess communication middleware similar to ROS. It is completely based on Qt and does not have any other dependencies.
New features
The major new features introduced in the API2 are:
- Kinect sensor now supported
- Support for up to 4 cameras.
- Support for up to 4 laser rangefinders.
- Support for camera controls like brightness, contrast, auto white balance (Note: The supported controls depend on the camera used).
- Integrated web server for controlling Robotino by a web browser or your smartphone.
- Easier build process due to minimal dependencies on external libraries.
- Uses TCP port 12080 for communication only. This minimizes problems with firewalls.
Getting started
- Quickstart guide to use API2
- How to build API2 examples
- How to install API2 daemons on Robotino
- Building API2 from sources
- C++ programming with API2
- Java programming with API2
- .Net programming with API2
Robotino API2 Overview