Difference between revisions of "Robotino Leitrechner Kommunikation"
From RobotinoWiki
| (2 intermediate revisions by the same user not shown) | |||
| Line 2: | Line 2: | ||
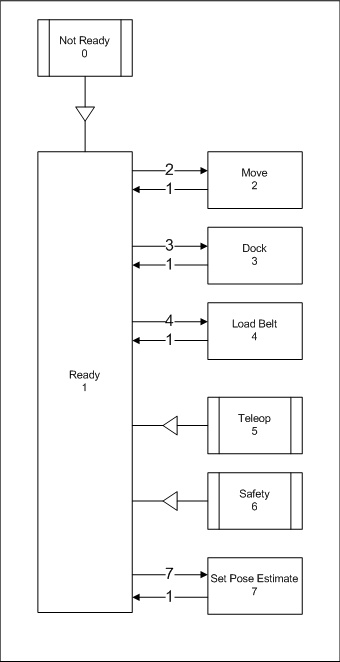
rect 38 20 131 75 [[Robotino_Leitrechner_not_ready|]] | rect 38 20 131 75 [[Robotino_Leitrechner_not_ready|]] | ||
rect 38 152 132 612 [[Robotino_Leitrechner_ready|]] | rect 38 152 132 612 [[Robotino_Leitrechner_ready|]] | ||
| − | rect 208 152 301 208 [ | + | rect 208 152 301 208 [[Robotino_Leitrechner_move|]] |
rect 208 228 301 283 [[Robotino_Leitrechner_dock|]] | rect 208 228 301 283 [[Robotino_Leitrechner_dock|]] | ||
rect 208 303 301 358 [[Robotino_Leitrechner_load_belt|]] | rect 208 303 301 358 [[Robotino_Leitrechner_load_belt|]] | ||
| Line 9: | Line 9: | ||
rect 208 558 301 613 [[Robotino_Leitrechner_set_pose_estimate|]] | rect 208 558 301 613 [[Robotino_Leitrechner_set_pose_estimate|]] | ||
</imagemap> | </imagemap> | ||
| + | |||
| + | =Nachrichtenaustausch= | ||
| + | ==Leitrechner zu Robotino== | ||
| + | {| class="wikitable" | ||
| + | |- | ||
| + | !INT | ||
| + | !Bedeutung | ||
| + | |- | ||
| + | |0 | ||
| + | |Nummer des Zielzustands | ||
| + | |- | ||
| + | |1 | ||
| + | |Arg0 | ||
| + | |- | ||
| + | |2 | ||
| + | |Arg1 | ||
| + | |- | ||
| + | |3 | ||
| + | |Arg2 | ||
| + | |- | ||
| + | |4 | ||
| + | |Arg3 | ||
| + | |} | ||
| + | |||
| + | ==Robotino zu Leitrechner== | ||
| + | {| class="wikitable" | ||
| + | |- | ||
| + | !INT | ||
| + | !Bedeutung | ||
| + | |- | ||
| + | |0 | ||
| + | |Aktueller Zustand | ||
| + | |- | ||
| + | |1 | ||
| + | |Zustandscode | ||
| + | |- | ||
| + | |2 | ||
| + | |Arg0 | ||
| + | |- | ||
| + | |3 | ||
| + | |Arg1 | ||
| + | |- | ||
| + | |4 | ||
| + | |Arg2 | ||
| + | |- | ||
| + | |5 | ||
| + | |Arg3 | ||
| + | |- | ||
| + | |6 | ||
| + | |Arg4 | ||
| + | |- | ||
| + | |7 | ||
| + | |Time | ||
| + | |} | ||
Latest revision as of 09:44, 19 June 2013

Nachrichtenaustausch
Leitrechner zu Robotino
| INT | Bedeutung |
|---|---|
| 0 | Nummer des Zielzustands |
| 1 | Arg0 |
| 2 | Arg1 |
| 3 | Arg2 |
| 4 | Arg3 |
Robotino zu Leitrechner
| INT | Bedeutung |
|---|---|
| 0 | Aktueller Zustand |
| 1 | Zustandscode |
| 2 | Arg0 |
| 3 | Arg1 |
| 4 | Arg2 |
| 5 | Arg3 |
| 6 | Arg4 |
| 7 | Time |