Difference between revisions of "API2"
From RobotinoWiki
(→Getting started) |
|||
| Line 28: | Line 28: | ||
* [[Cpp2|How to build API2 examples]] | * [[Cpp2|How to build API2 examples]] | ||
* [[API2_install_daemons|How to install API2 daemons on Robotino]] | * [[API2_install_daemons|How to install API2 daemons on Robotino]] | ||
| − | |||
* [[Cpp2|C++ programming with API2]] | * [[Cpp2|C++ programming with API2]] | ||
| − | |||
| − | |||
== Robotino API2 Overview == | == Robotino API2 Overview == | ||
Revision as of 14:59, 28 January 2019
Contents
Introduction
| The new API2 for Robotino is currently in its final stages of development and it is supposed to replace the current OpenRobotinoAPI on Robotino. |
Package links |
|---|
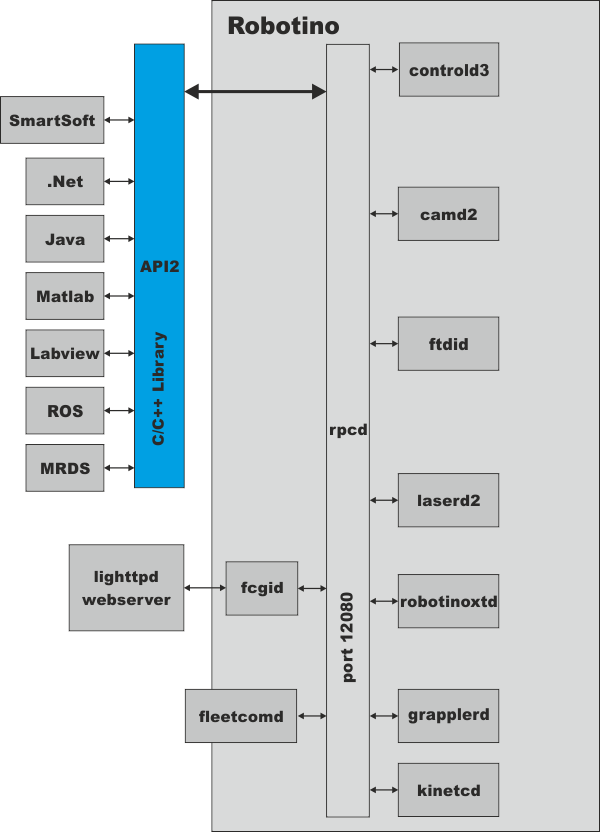
The new API2 is based on a RPC like infrastructure. The REC-RPC library is a interprocess communication middleware similar to ROS. It is completely based on Qt and does not have any other dependencies.
Documentation can be found here.
New features
The major new features introduced in the API2 are:
- Kinect sensor now supported
- Support for up to 4 cameras.
- Support for up to 4 laser rangefinders.
- Support for camera controls like brightness, contrast, auto white balance (Note: The supported controls depend on the camera used).
- Integrated web server for controlling Robotino by a web browser or your smartphone.
- Easier build process due to minimal dependencies on external libraries.
- Uses TCP port 12080 for communication only. This minimizes problems with firewalls.
Getting started
- Quickstart guide to use API2
- How to build API2 examples
- How to install API2 daemons on Robotino
- C++ programming with API2
Robotino API2 Overview